Küstenstürme und Überschwemmungen können plötzliche Wassermassen über Straßen, Parkplätze und Evakuierungsrouten in tief gelegenen Küstengemeinden schicken. Steigendes Wasser kann Autos vom Boden abheben, lange bevor die Tiefe lebensbedrohlich erscheint. Unter normalen Umständen sind Fahrzeuge nicht dafür ausgelegt zu schwimmen. Ihre Gewichtsverteilung, Motorplatzierung und Karosseriestruktur führen typischerweise dazu, dass sie in tiefem Wasser sinken oder instabil werden.
Diese Dynamik hat zu wachsendem Interesse von Automobilherstellern an der Entwicklung von Fahrzeugen mit kontrollierten Schwimmfunktionen für Notevakuierungsszenarien geführt. Es wird entscheidend zu verstehen, wie der Antrieb über die normalen Räder im Wasser funktionieren kann, wenn sie den Bodenkontakt verlieren, und wie das Karosseriedesign die Stabilität während des Schwimmens beeinflusst. Ingenieure benötigen zuverlässige Simulationswerkzeuge, um das Fahrzeugverhalten unter Hochwasserbedingungen vorherzusagen, Auftriebskräfte zu bewerten und die Wirksamkeit des Antriebssystems in halbgetauchten Zuständen zu evaluieren.
Fallbeschreibung
Das simulierte Szenario untersucht das Schwimmverhalten eines abgedichteten Autos und seinen Antrieb im Wasser mit den folgenden Antriebsmodi: Hinterradantrieb (RWD) und Allradantrieb (AWD). Zum Vergleich wurde auch ein Szenario ohne Radbewegung untersucht.
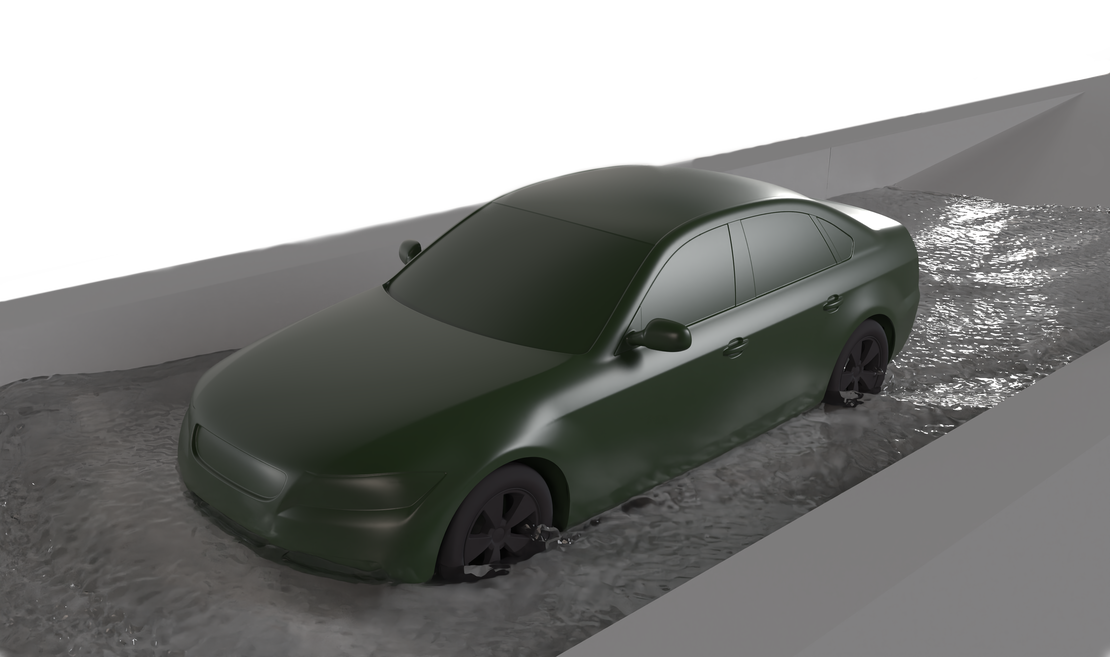
Zu Beginn der Simulation steht das Auto auf dem Boden eines oben offenen Behälters, der mit einem Podium mit Rampe verbunden ist.
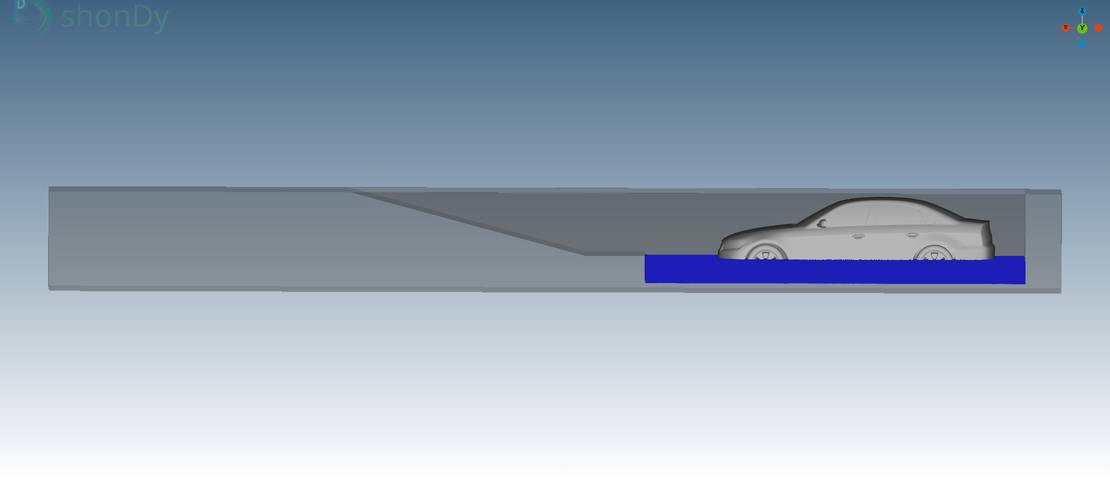
Der anfängliche Wasserstand im Behälter beträgt 0,4 m. Die Box wird dann 4,4 Sekunden lang geflutet, bis der Wasserstand 1 m erreicht, was dazu führt, dass das Auto schwimmt. Danach bewegt sich das Auto entsprechend der jeweiligen Antriebsmodi. Die Radgeschwindigkeit des Autos ist auf 21 m/s eingestellt, was zu einer Drehgeschwindigkeit der Räder von 65,63 rad/s führt.
Bei diesem Aufbau wurde der Fluidpartikelradius auf 7,4 mm eingestellt, was zu insgesamt 1,5 Millionen Partikeln vor und 5,25 Millionen Partikeln nach dem Fluten des Behälters führt.
Ergebnisse & Analyse
Auftrieb und Schwimmdynamik
Im folgenden Video beginnt der Wasserstand im Behälter zu steigen, was schließlich dazu führt, dass das Auto schwimmt.
Damit ein Auto im Wasser schwimmt, muss die Masse des vom Auto verdrängten Wassers die Eigenmasse des Autos übersteigen. Beide Massen können mit dieser Formel berechnet werden:
wobei ρ die durchschnittliche Dichte des Autos bzw. des verdrängten Wassers ist und V das jeweilige Volumen ist.
Wenn der Wasserstand steigt, steigt auch das vom Auto verdrängte Wasservolumen, wodurch die Masse des gesamten verdrängten Wassers zunimmt, bis sie die Masse des Autos übersteigt. Dies führt dazu, dass das Auto schwimmt.
Um quantitative Aussagen über die Schwimmbedingungen treffen zu können, werden der Wasserstand im Behälter und der Schwerpunkt des Autos in einem Diagramm über die Zeit aufgetragen.
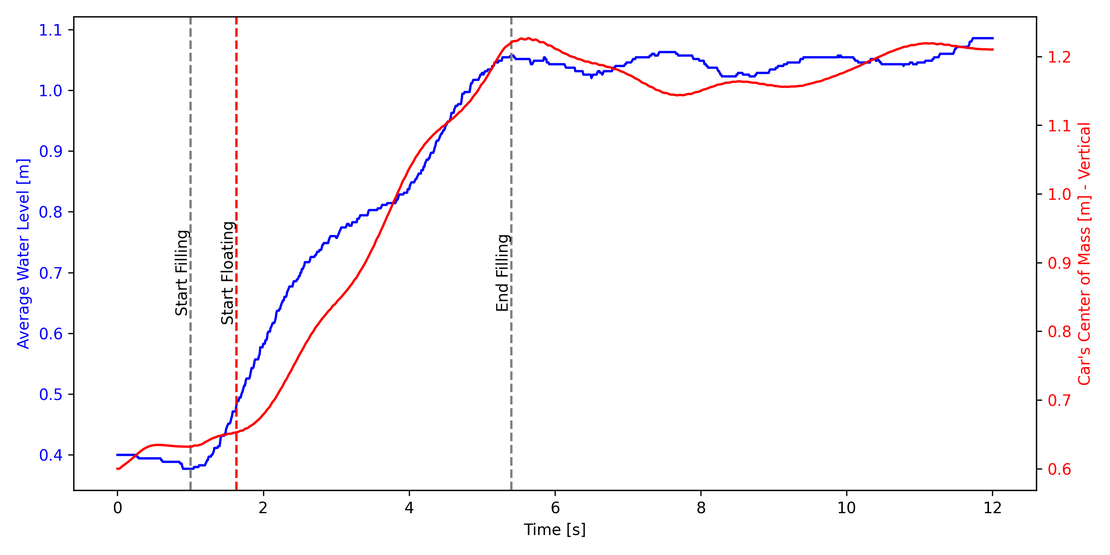
In diesem Diagramm kann die Dynamik des Füll- und Schwimmprozesses im Detail analysiert werden. Der Beginn und das Ende des Füllprozesses sind bei 1 s bzw. 5,4 s markiert. Zwischen diesen beiden Punkten steigt der Wasserstand.
Der Beginn des Schwimmens ist ebenfalls bei 1,63 s und einem Wasserstand von 0,48 m markiert, was entscheidende Informationen über die Schwimmbedingungen liefert.
Antriebsverhalten: Keine Bewegung vs. RWD vs. AWD
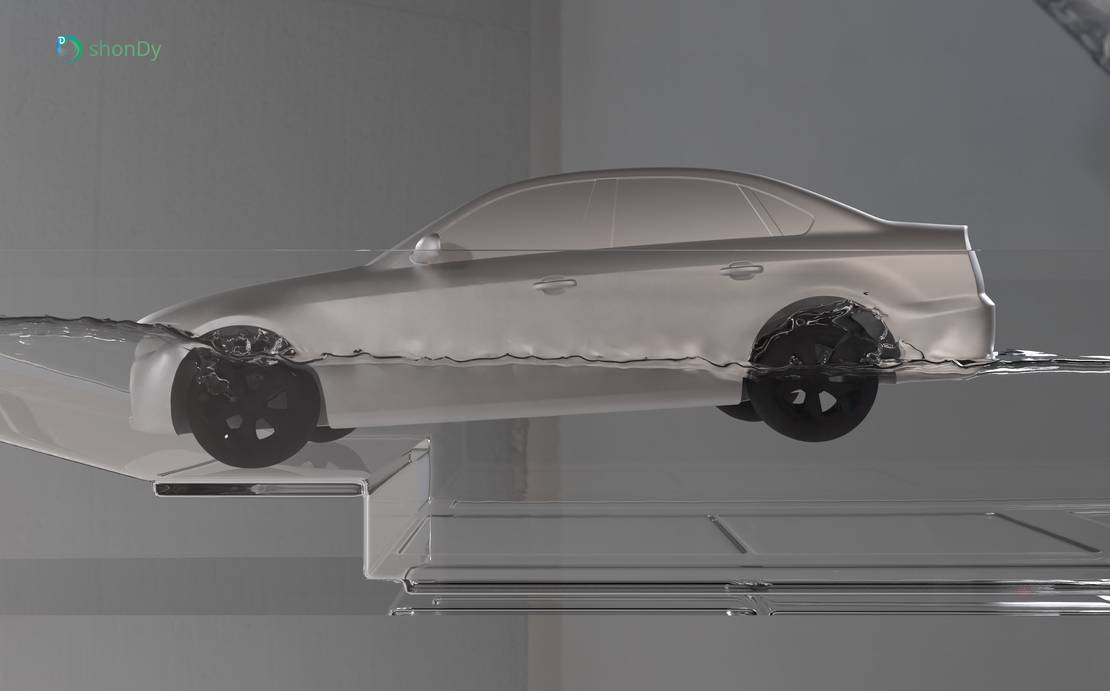
Die nächsten Videos zeigen den Antrieb des Autos im Wasser mit den verschiedenen Antriebsmodi. Ohne Radbewegung driftet das Auto mit der Strömung bei niedrigen Geschwindigkeiten ohne gerichtete Bewegung. Im Gegensatz dazu bewegt sich das Auto mit RWD mit einer deutlich höheren Geschwindigkeit vorwärts. Dies bestätigt, dass die Radbewegung die Bewegung des Autos in einem Schwimmszenario beeinflusst.
Mit RWD berührt das Auto die Rampe und wird abgestoßen, weil die nach vorne gerichtete Kraft der Räder nicht stark genug ist, um es die Rampe hinauf und aus dem Wasser zu schieben.
Das Auto mit AWD wird im Vergleich zum Auto mit RWD mit noch höherer Geschwindigkeit nach vorne angetrieben, bis es in Kontakt mit der Rampe kommt. Sobald die Vorderräder die Rampe berühren, führt die Traktion zwischen den beiden Festkörpern dazu, dass das Auto beschleunigt und aus dem Wasser die Rampe hinauffährt.
Das folgende Diagramm zeigt die Geschwindigkeit des Autos und die Winkelgeschwindigkeit der jeweiligen Räder über die Zeit für die drei Antriebsmodi.
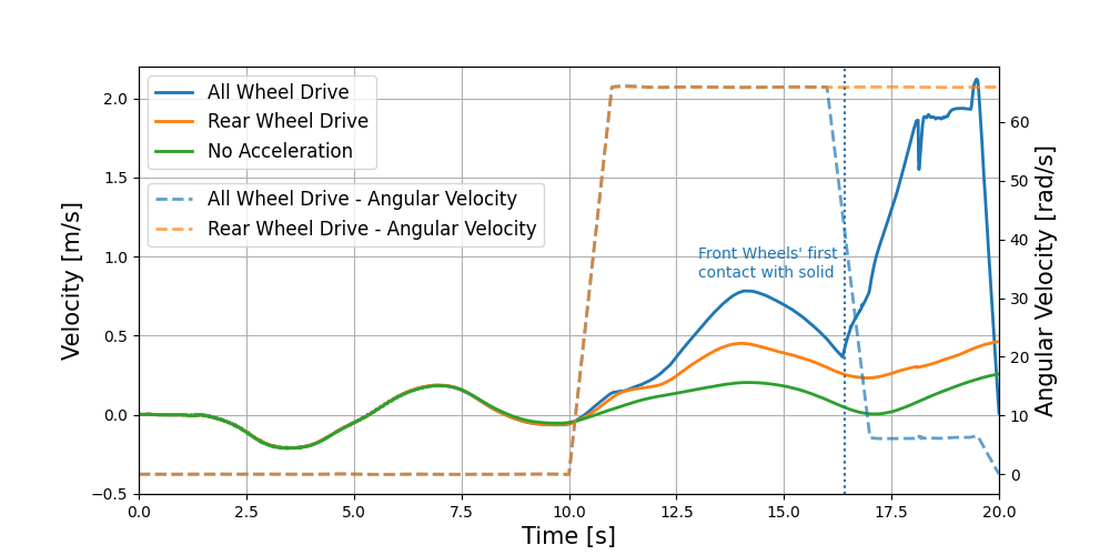
Nach 10 Sekunden steigt die Winkelgeschwindigkeit der AWD- und RWD-Autos stark auf 65,63 rad/s an, was zu einer Geschwindigkeitszunahme für beide Autos führt. Die Geschwindigkeit des AWD-Autos steigt auf ihrem Höhepunkt auf etwa das 2-fache der maximalen Geschwindigkeit des RWD-Autos.
Nach etwa 16 s berühren die Vorderräder des AWD-Autos die feste Rampe, was durch eine schwarze vertikale Linie gekennzeichnet ist. Der Kontakt zwischen den sich bewegenden Vorderrädern und der Rampe führt zu einem plötzlichen Geschwindigkeitsanstieg, und die Winkelgeschwindigkeit wird aktiv verringert; andernfalls wäre die Beschleunigung zu hoch.
Die Geschwindigkeit des RWD-Autos schwankt um einen konstanten Wert. Dies zeigt an, dass das Auto die feste Rampe noch nicht berührt hat. Das Berühren der Rampe würde aufgrund der Abstoßung zu einem starken Geschwindigkeitsabfall führen.
Alle drei Geschwindigkeitskurven zeigen einen Höhepunkt nach etwa 14 Sekunden. Dies kann durch das Auftreffen der Impulswelle erklärt werden, die durch die Vorwärtsbewegung der Autos verursacht wird und an der Rampe reflektiert wird.
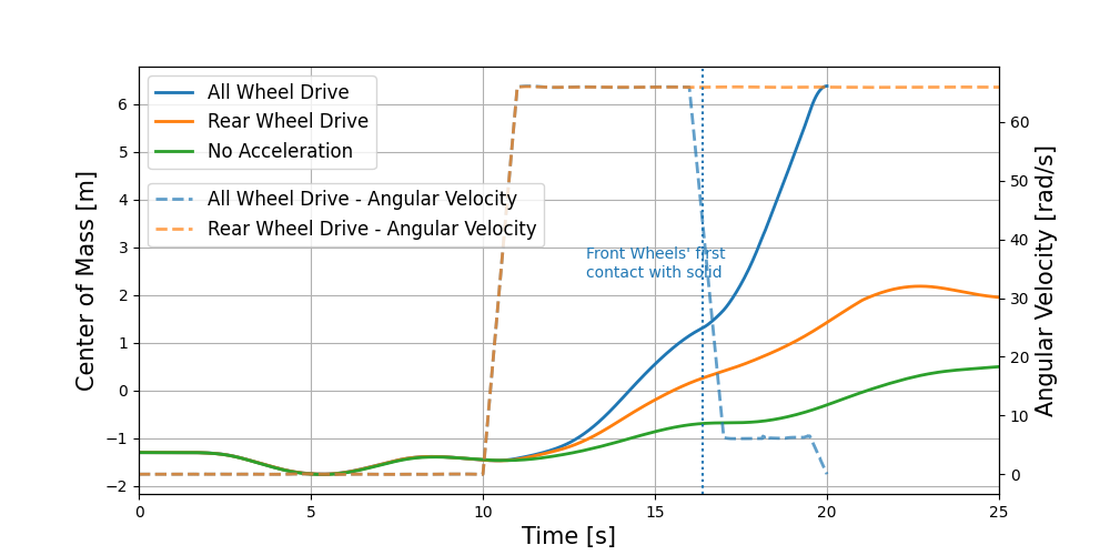
Das nächste Diagramm zeigt den Schwerpunkt der Autos und die Winkelgeschwindigkeit über die Zeit. Der Schwerpunkt gibt Aufschluss über die Position der Autos. Es zeigt, dass das Auto mit AWD das Ende des Beckens viel schneller erreicht als das RWD und das Wasser verlassen kann. Die AWD-Simulation endet nach 20 Sekunden, wenn die Spitze der Rampe erreicht wird.
Das RWD-Auto kann sich durch das Becken antreiben und erreicht im Gegensatz zum Auto ohne Radbewegung das Ende des Beckens, kann es aber nicht verlassen.