Splash lubrication in gearboxes looks straightforward until you try to simulate it accurately. The gears spin, the oil flies, and the surfaces that need lubricant are never the same ones from one millisecond to the next. That combination of a continuously fragmenting free surface, moving geometry, and strong sensitivity to fluid properties is exactly where conventional mesh-based CFD starts to struggle, and where the choice of simulation method matters more than most engineers expect.
Intro
This article walks through why that is the case, what the physics of splash lubrication actually demand from a simulation method, and what validated results from two shonDy gearbox lubrication studies show when you test the limits of the method, including a comparison of lubricant behaviour between 25°C and -40°C.
The Physics That Make Splash Lubrication Hard to Simulate
In splash lubrication, rotating gears dip into an oil bath and distribute lubricant through the gearbox by flinging it toward bearings, channels, and housing surfaces. There is no dedicated pump circuit or controlled jet stream, the distribution depends entirely on the rotational speed, the oil level, the geometry of the housing, and the viscosity of the lubricant at operating temperature.
The simulation challenge follows directly from this. The oil surface breaks apart continuously as the gears interact with the bath. Droplets form, impact housing walls, coalesce into films, and drain back into the sump. The oil’s phase boundary is therefore a highly transient, topologically complex free surface that undergoes fragmentation and reconnection throughout the simulation. At the same time, the gear geometry is rotating, which means the computational domain is never static.
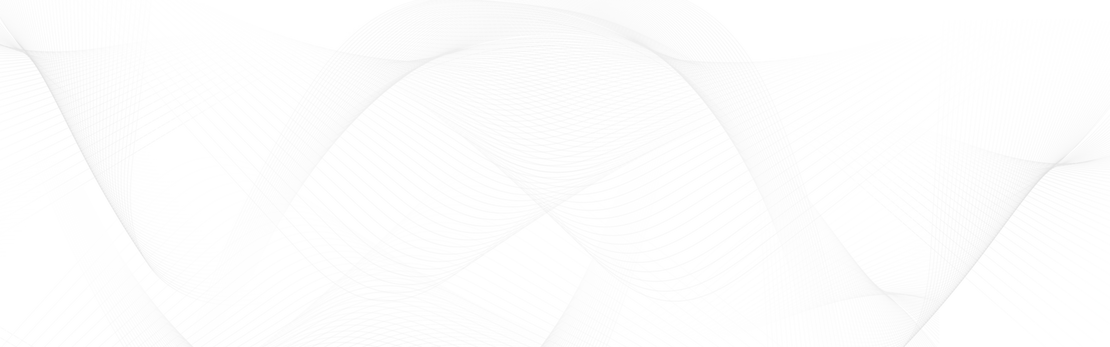
What the simulation needs to predict, concretely, is whether the lubricant reaches the bearings. That requires accurately capturing the free surface dynamics that carry oil into the small channels leading to the bearing chambers, which are a few millimetres wide. This combination of continuously changing geometry and a continuously changing fluid phase distribution is exactly where particle-based methods such as those used in shonDy excel.
Why Mesh-Based CFD Struggles Here
Finite Volume Method (FVM) CFD is well established for flows in fixed or slowly deforming domains. When the geometry is rotating and the free surface undergoes large deformations, including fragmentation, the mesh must either deform continuously or be reconstructed at intervals to remain valid. Both strategies add computational overhead and introduce approximations at the interface.
The specific difficulty in gearbox splash lubrication is that the oil’s interface does not simply translate or deform smoothly. It tears apart where the gear teeth exit the bath and reconnects where oil falls back into the sump. Mesh-based volume-of-fluid (VOF) methods track this interface on a fixed grid, which works well for moderate interface deformation but becomes increasingly approximate as the fragmentation becomes more severe. Handling the narrow channels leading to the bearing chambers, where the flow is driven by an oscillating column of oil above them, requires fine local resolution and careful attention to how the interface is reconstructed near the channel entries.
Rotating geometry compounds this. The standard approach involves moving mesh zones or sliding interfaces between rotating and stationary regions, which adds complexity to the setup and introduces interpolation at the zone boundaries. In a gearbox with multiple rotating shafts and gear pairs at different speeds, this becomes a non-trivial modelling decision.
Splash lubrication presents all three of these challenges at once: a continuously fragmenting interface, rotating multibody geometry, and strong viscosity dependence. We compare particle-based and finite volume CFD in general in a dedicated article on the two methods; the rest of this article stays focused on what that combination means for gearbox lubrication specifically.
How Particle-Based CFD Handles It Differently
In a particle-based solver like shonDy, which uses the Moving Particle Semi-implicit (MPS) method, the fluid is represented as a collection of discrete particles that carry mass, velocity, and thermodynamic properties. There is no mesh to deform or reconstruct. The free surface is defined by the particle distribution itself, and fragmentation, coalescence, and film formation are handled naturally without any additional interface-tracking logic.
Rotating geometry is handled with equal directness. In shonDy, the gear geometry is defined as a moving solid boundary, and the particles interact with it at each time step according to the prescribed rotational motion. The gears, shafts, and housing are all part of the same multibody system, and their motion is imposed directly on the simulation without requiring sliding mesh zones or interpolation at boundaries. This is not a workaround for the problem of moving geometry, but a natural consequence of the meshless formulation, which makes no distinction between fixed and moving boundaries in terms of how particle-wall interactions are computed.
On multibody dynamics: The gearbox simulations described here include two gear pairs with distinct gear ratios (0.4468 and 0.3607, for an overall ratio of 0.1611), meaning each shaft rotates at a different speed. Both gear pairs are part of the same simulation without any domain decomposition between them.
The particle size comparison conducted as part of the base gearbox case confirms that the case can be run at resolutions that are computationally tractable on a single workstation. Comparing the base case at approximately 500,000 particles (0.42 mm particle radius) with a higher-resolution case at approximately 1,000,000 particles (0.33 mm radius), the volume flow rates into the bearing chambers showed comparable behaviour across both resolutions. This gives confidence that the 500,000 particle setup is sufficient for capturing the key lubrication dynamics in this geometry.
What Governs Whether Splash Lubrication Works
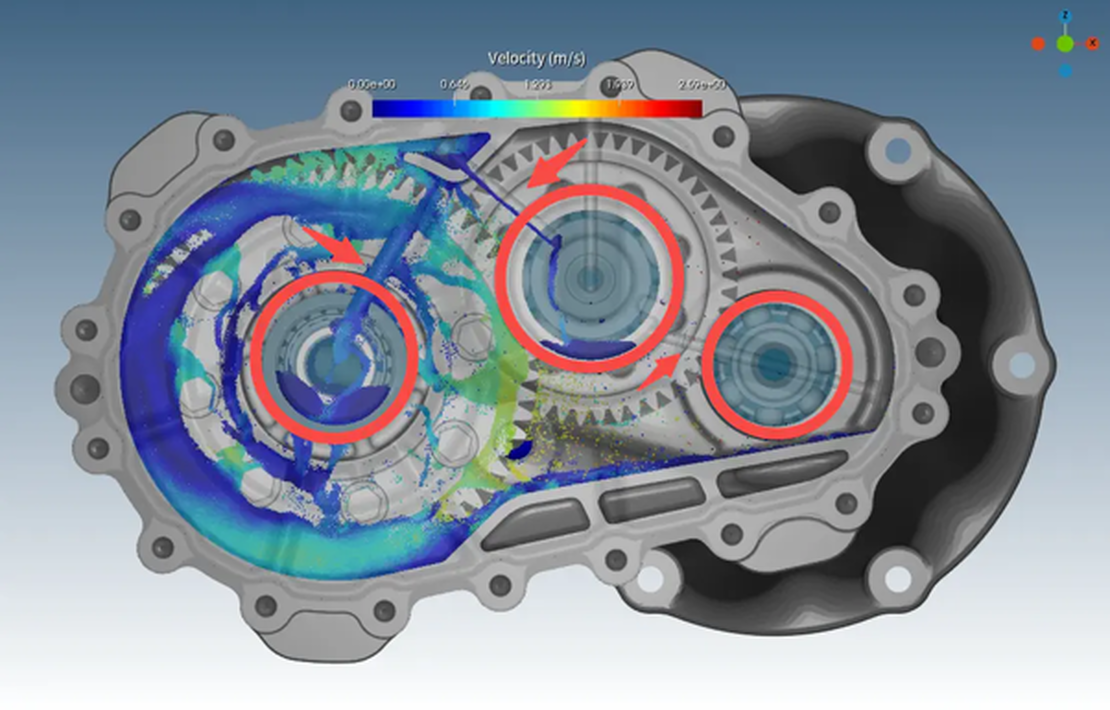
Three things determine whether oil reaches the bearings in a splash-lubricated gearbox: rotational speed, lubricant viscosity, and the amount of oil in the sump. The two studies here varied speed and viscosity, each holding the oil volume constant, and in both cases the simulation reproduced the behaviour seen in physical experimental footage. Oil volume is the third lever, and a constrained one: more oil makes the bearings easier to reach, but it also raises churning losses, and keeping those losses low is a constant goal in gearbox design. Finding the smallest fill that still lubricates reliably is exactly the kind of trade-off a simulation can settle before a physical prototype exists.
Speed sets whether oil reaches the bearings at all. Below a threshold speed, the gear cannot lift oil high enough to fill the pool at the top of the housing that feeds the bearing channels, and the bearings starve regardless of everything else. In the first study (mineral oil at 16 cSt, 300 ml), 480 RPM leaves the pool unfilled and the bearings dry. At 980 RPM the pool fills and the left and middle bearings receive an oscillatory supply while the right stays unsupplied. At 1453 RPM the distribution is similar but reaches quasi-steady state far faster, around 1.8 seconds versus more than 5 seconds. The simulation matched the experiment at every speed, including the insufficient lubrication at 480 RPM.
Viscosity sets whether that speed is still enough. A speed sufficient for warm oil can fail for cold oil. The second study ran the same gearbox at a fixed 1543 RPM at two lubricant temperatures.
At 25°C (33.6 cSt) all three bearing chambers are supplied. At -40°C, where the kinematic viscosity is roughly 97 times higher (3247 cSt), only the left bearing receives oil and the middle and right run dry. Same speed, same geometry: the higher viscosity alone starves two of the three bearings, and the simulation reproduced that shift just as the experiment showed it.
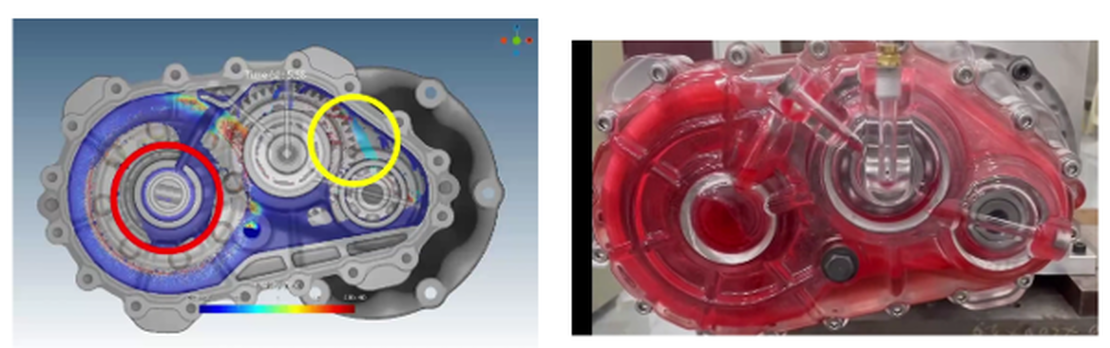
Table 1: Lubricant properties in the temperature study.
| Parameter | 25°C | -40°C |
|---|---|---|
| Input speed | 1543 RPM | 1543 RPM |
| Density | 809.4 kg/m³ | 840.5 kg/m³ |
| Kinematic viscosity | 33.6 cSt | 3247 cSt |
Conclusion
Splash lubrication simulation is technically demanding, and not because the engineering problem is obscure, but because the combination of a fragmenting free surface, rotating geometry, and strong sensitivity to fluid properties puts pressure on exactly the assumptions that mesh-based CFD methods rely on. The two gearbox case studies described here illustrate what particle-based CFD can offer in this context: a natural treatment of moving geometry through the multibody dynamics framework, free surface handling without interface reconstruction, and the ability to directly test sensitivity to viscosity changes across a realistic temperature range.
These studies confirm that this method captures the qualitative and, in most cases, quantitative lubrication behaviour across a range of speeds and temperatures, with direct experimental comparison as the reference.
For engineers designing gearboxes or electric drive units where passive splash lubrication is part of the cooling and lubrication strategy, the choice of simulation method has direct consequences for the reliability of the predictions.
For the same approach applied to a full electric drive unit, where the simulation surfaced a transmission bearing running completely dry, see Simulating Splash Lubrication in an EDU.
If you are evaluating simulation methods for gearbox or EDU lubrication and want to apply this approach to your own design, request a trial of shonDy.